Während in den Experimenten aus Kapitel 6 der ftDuino-Controller im Mittelpunkt stand und nur wenige externe Komponenten Verwendung fanden geht es in diesem Kapitel um komplexere Modelle. Der ftDuino spielt dabei eine untergeordnete Rolle.
Sämtliche Modelle stammen aus aktuellen Baukästen bzw. sind nah an deren Modelle angelehnt, so dass ein Nachbau mit dem entsprechenden Kasten möglich ist.
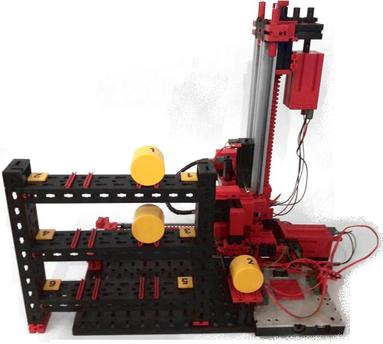
Das Modell Hochregallager stammt aus dem Baukasten ``Automation
Robots''. In der Originalanleitung wird der Einsatz des TX-Controllers
beschrieben. Ein Zusatzblatt beschreibt den TXT-Controller.
Der Beispielsketch Datei ► Beispiele ► Ftduino ► HighLevelRack steuert das Modell ``Hochregallager'' aus dem Baukasten 511933 ``ROBO TX Automation Robots''. Der Anschluss des ftDuino an das Modell entspricht dabei exakt dem Schaltplan für den TXT.
Die Bedienung erfolgt dabei aus dem seriellen Monitor vom PC aus1 .
Wichtig: Damit die Befehlseingabe klappt müssen im
seriellen Monitor die Zeilenden auf Neue Zeile oder
Zeilenumbruch (CR) eingestellt worden sein, wie im
Abschnitt 3.3.1 beschrieben.

Die Eingänge des ftDuino sind auch im Schalter-Modus mit den
fischertechnik-Fototransistoren kompatibel. Ein beleuchteter
Transistor liefert dann den Wahrheitswert ``wahr'', ein unbeleuchter
den Wert ``unwahr''.
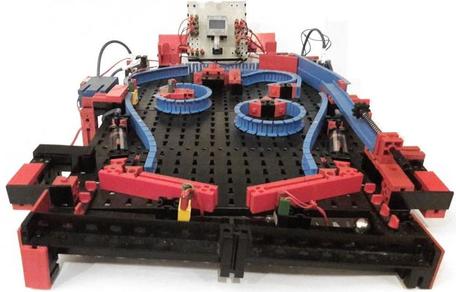
Der Beispiel-Sketch des Flippers aus dem ElectroPneumatic-Set findet sich unter Datei ► Beispiele ► Ftduino ► Pinball. Er nutzt die Fototransistoren als Schaltereingänge für die Lichtschranken. Eine durch eine Kugel unterbrochene Lichtschranke liefert dann den Wert ``unwahr'':
if(!ftduino.input_get(Ftduino::I4)) {
if(millis() - loose_timer > 1000) {
// ...
}
loose_timer = millis();
}
Dieser Sketch nutzt ein OLED-Display, um verbliebene Spielbälle und den Punktestand anzuzeigen2 . Da am ftDuino noch Ausgänge frei sind können stattdessen auch Lampen oder Leuchtdioden verwendet werden.
Der mobile Linienfolger ist an die Modelle des ``ROBOTICS TXT
Explorer''-Sets angelehnt und nutzt den ``IR Spursensor'' dieses Sets.
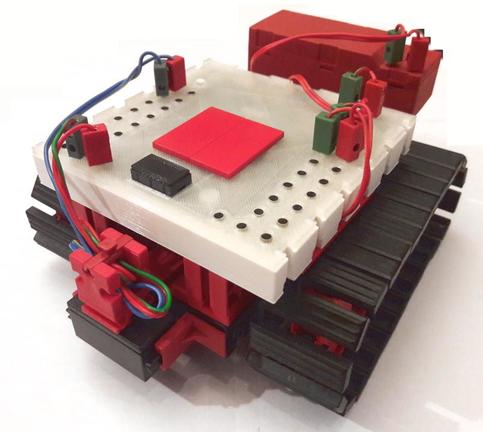
Ein passender Beispiel Sketch ist unter Datei ► Beispiele ► Ftduino ► LineSensor zu finden. Dieser Sketch wertet kontinuierlich den Liniensensor aus, um eine schwarzen Linie zu folgen3 .
Der Liniensensor wird mit seinen gelben und blauen Kabeln an zwei
beliebige der Eingänge I1 bis I8 angeschlossen. Zusätzlich
erfolgt über die roten und grünen Kabel die Spannungsversorgung
durch den ftDuino.
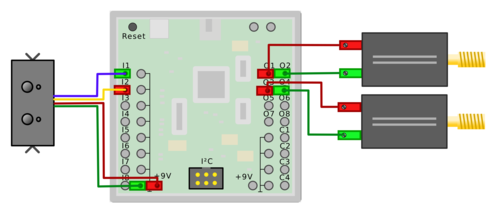
In diesem Fall ist der Spursensor an die Eingänge I1 und I2 angeschlossen. Der Sensor liefert nahezu maximale Spannung (circa 9 Volt) wenn eine weiße Fläche erkannt wird und nur wenig Millivolt, wenn die schwarze Linie erkannt wurde.
// beiden Eingänge auf Spannungsmessung einstellen
ftduino.input_set_mode(Ftduino::I1, Ftduino::VOLTAGE);
ftduino.input_set_mode(Ftduino::I2, Ftduino::VOLTAGE);
// beide Spannungen auslesen
uint16_t linker_wert = ftduino.input_get(Ftduino::I1);
uint16_t rechter_wert = ftduino.input_get(Ftduino::I2);
// eine Spannung kleiner 1 Volt (1000mV) bedeutet 'Linie erkannt'
if((linker_wert < 1000) && (rechter_wert < 1000)) {
// beide Sensoren haben die Linie erkannt
// ...
}
Ein klassisches Modell ist die Ampel bzw. die Fußgängerampel. Das
Modell bildet eine Bedarfsampel mit je drei Lampen für die Autos und
zwei für Fußgänger ab.
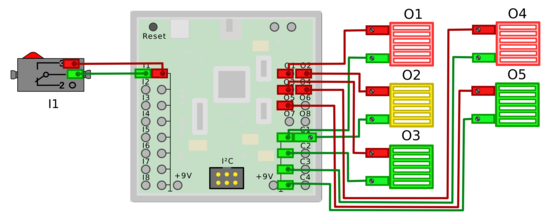

Ein passender Beispiel-Sketch ist unter
Datei ► Beispiele ► FtduinoSimple ► PedestrianLight zu finden. Er implementiert
die Ampel in Form eines Zustandsautomaten. Die Lichtfolge entspricht
dabei dem üblichen Ablauf in acht Schritten von ``Autos haben grün,
Fußgänger rot'' über die Grünphase für die Fußgänger bis schließlich
die Autos wieder fahren dürfen.
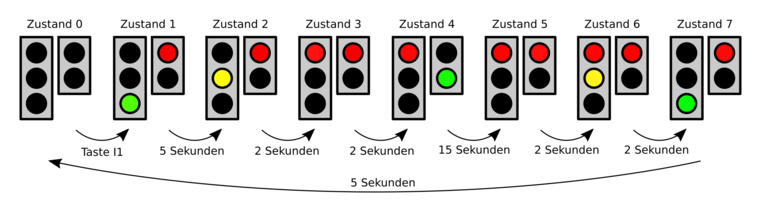
Die einfache und naheliegenden Umsetzung der Ampelsteuerung in Software bestünde aus einem Programm, das dem Verlauf der Ampelzustände direkt folgt. Der Programmablauf stoppt, wenn auf den Tastendruck oder auf den Ablauf einer Zeit gewartet wird und setzt fort, wenn das entsprechende Ereignis eingetreten ist. Im Folgenden ist dies exemplarisch für die ersten zwei Zustände der Ampel dargestellt.
void loop() {
// warte auf Tastendruck
while(!ftduino.input_get(BUTTON)) {
};
// Ampel schaltet ein, Autos haben grün, Fußgänger rot
cars_green();
pedestrians_red();
delay(CARS_GREEN_PHASE);
// Autos bekommen gelb
cars_yellow();
delay(YELLOW_PHASE);
// ...
}
Der PedestrianLight-Sketch soll aber beispielsweise nebenbei mit der eingebauten LED des ftDuino blinken. Dies soll unterbrechungsfrei passieren und unabhängig davon sein, in welchem Zustand sich die eigentliche Ampel gerade befindet.
Die Lösung ist ein Zustandsautomat.
// die loop-Funktion wird immer wieder aufgerufen
void loop() {
// Zeitpunkt des nächsten Lichtwechsel-Ereignisses
static unsigned long next_event = 0;
// Aktueller Zustand der Amepl
static char state = 0;
// Die interne Leuchtdiode soll einmal pro Sekunde blinken
static unsigned long flash_timer = 0;
if(millis() > flash_timer + 10)
digitalWrite(LED_BUILTIN, LOW);
if(millis() > flash_timer + 1000) {
digitalWrite(LED_BUILTIN, HIGH);
flash_timer = millis();
}
// Teste ob ein Fussgänger im Zustand 0 (Ampel aus) den
// Knopf gedrückt hat
if((state == 0) && (ftduino.input_get(BUTTON)))
state = 1; // ja -> wechsel in Zustand 1
if(state > 0) {
// Teste, ob die eingestellte Zeit vergangen ist
if(millis() > next_event) {
switch(state) {
// Ampel wechselt in Zustand 1: Autos haben grün, Fussgänger haben rot
case 1: {
// schalte Lampen
cars_green();
pedestrians_red();
// setze Zeitpunkt für nächstes Ereignis
next_event = millis() + CARS_GREEN_PHASE;
// setze Zustand für nächstes Ereignis
state++; // Kurzschreibweise für "state = state + 1"
break;
}
// Ampel wechselt in Zustand 2: Autos haben gelb, Fussgänger haben rot
case 2: {
cars_yellow();
next_event = millis() + YELLOW_PHASE;
state++;
break;
}
// Ampel wechselt in Zustand 3: Autos haben rot, Fussgänger haben rot
case 3: {
// ...
break;
}
// ...
}
}
}
}
Auf diese Weise ist es möglich, die LED völlig unabhängig blinken zu lassen und ggf. auch weitere Steueraufgaben zu erledigen.
Geschuldet ist der große Aufwand der Tatsache, dass der ftDuino über kein eigenes Betriebssystem verfügt, das mehrere Programmteile (sogenannte Prozesse oder Threads) gleichzeitig bedienen könnte, wie es auf PCs und Smartphones z.B. üblich ist.
Der große Vorteil des einfachen ftDuino-Ansatzes liegt in der seiner exakten Vorhersagbarkeit. Jeder kennt es vom PC oder Smartphone, wenn das Betriebssystem im Hintergrund unerwartet ``beschäftigt'' ist und die Programmausführung stockt. Was bei einer Bedienoberfläche nur lästig ist kann bei Steuer- und Regelaufgaben leicht zu einem Problem werden, wenn z.B. ein Motor bei Erreichen einer bestimmten Position nicht schnell genug gestoppt wird. Aus diesem Grund kann der wesentlich einfachere ftDuino auf viele Dinge schneller und vorhersagbarer reagieren als z.B. ein vom Linux-Betriebssystem angetriebener TXT-Controller oder Raspberry-Pi. Ein weiterer positiver Effekt des nicht vorhandenen Betriebssystems ist der schnelle Systemstart. Ein ftDuino ist sofort nach dem Einschalten voll funktionsfähig und man muss keinen Betriebssystemstart abwarten, bevor das Gerät seine Aufgaben erfüllen kann.
Der schnelle Systemstart und das leicht vorhersagbare Verhalten sind die Hauptgründe, warum es auch im kommerziellen Umfeld immer einen Bedarf an solch einfachen Systemen wie dem ftDuino gibt, auch wenn der Einsatz komplexer, betriebssystembasierter Lösungen mit sinkenden Hardware-Preisen auch in immer einfacheren Geräten möglich wird.
Der fischertechnik-Plotter 305714 von 1985 war eines der ersten
Computing-Modelle von fischertechnik. Die Bewegung in X- und Y-Achse
wurde von 6-Volt-Schrittmotoren realisiert, der Stift wurde durch
einen Magneten gehoben und gesenkt. Die Ansteuerung erfolgte über
die acht Ausgänge des damaligen Computing-Interface, wobei der Stift
recht trickreich mit einem der Motoren kombiniert wurde, um mit den
insgesamt 8 Ausgängen auszukommen.
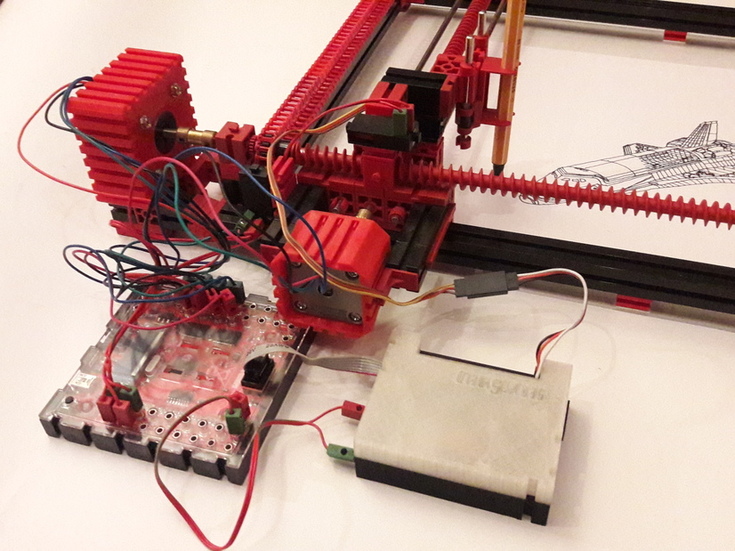
Das hier vorgestellte Modell hat die gleichen Maße und verwendet eine
sehr ähnliche Grundmechanik. Es werden ebenfalls zwei Schrittmotoren
eingesetzt, allerdings 12-Volt-Varianten, die auch an 9 Volt genug
Kraft für den Plotterbetrieb entwickeln. Die Schrittmotoren werden wir
in Abschnitt 6.4 beschrieben angesteuert und
angeschlossen.
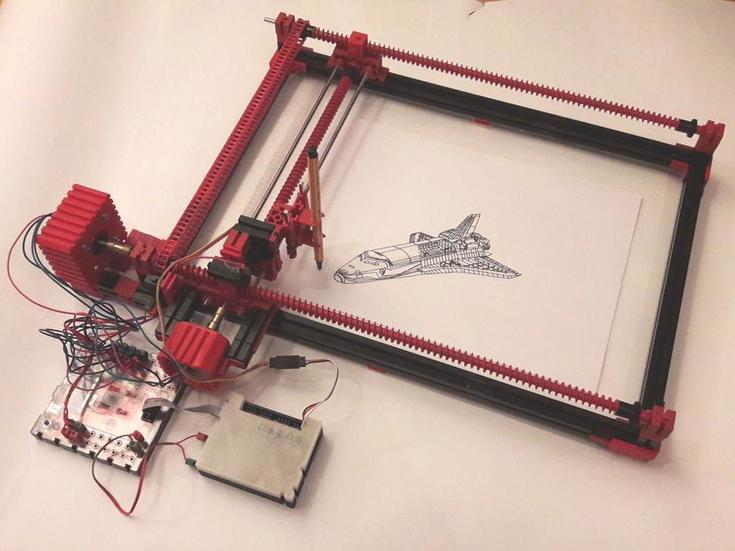
Der Stift wird in diesem Modell von einem fischertechnik-Servo gehoben und gesenkt. Dabei könnte der Ansatz aus Abschnitt 6.5 verwendet werden. In diesem Fall wurde stattdessen das I²C-Servo-Shield5 verwendet. Es ist etwas unhandlicher, erlaubt aber einen echten I²C-Betrieb und ist so mit dem OLED-ftDuino kompatibel.
Der passenden Sketch unter Datei ► Beispiele ► FtduinoSimple ► Plotter ist sehr einfach gehalten und hat großes Verbesserungspotenzial. Er akzeptiert auf der USB-/COM-Schnittstelle plotterübliche HP-GL-Kommandos6 und kann daher direkt aus vielen PC-Programmen angesprochen werden.